Allen Bradley Servo Testing
Keeping up with Technology
Understand
RSlogix 5000 Servo Testing
Keeping up with Technology
RSLogix 5000 Kinetix 6000 Servo Soft Limits
Have you ever had servo physical axis faults that seem to happen and was hard to understand why the programmer put limits or hardware devices to put limits on a servo controller?
I have and this is why I made this article, it will briefly describe soft limits and hard limits of servos controlled by RSLogix 5000 or Studio 5000. Also, highlighting how you can trouble shoot them in the event you have machines that have certain limitations in the application..
Therefore, to understand how this is done, you will first be required to open the axis attributes of the servo, navigate to the limits tab.
Here you will see in the servo attribute tab that there are two limit types:
-Servo Hard Travel Limits
-Servo Soft Travel Limits
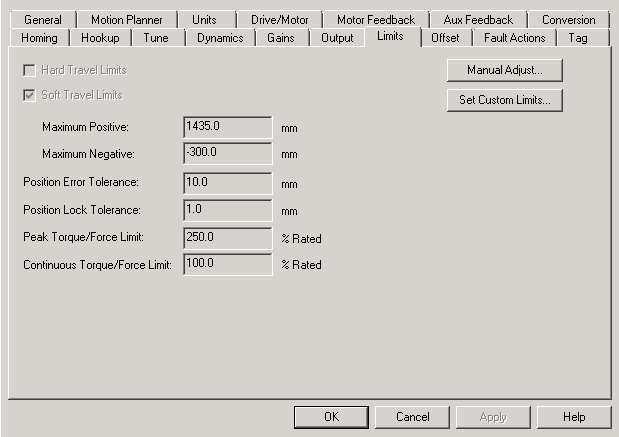
Allen Bradley Servo Hard Travel Limits
Allen Bradley Servo Soft Travel limits
This is usually meant for the software part of a device, some systems have this in order to provide support and effort to help prevent the machine from any physical damage.
Here is a video I made to better describe this, this video can also be seen on my YouTube channel.
RSLogix 5000 Kinetix 6000 Servo Limits Breakdown
As you can see from the video, even though it is only a little more than six minutes long, the details of soft limits and overcoming them are well detailed and describe. What I try to do in my videos, is to give a very detailed understanding in a short time frame them cover other elements over an article on my website.
In the next section of this article, I will go over a few more elements on how to recover from a physical fault created by a soft limit.
How to fix a servo physical fault in RSLogix 5000 or Studio 5000
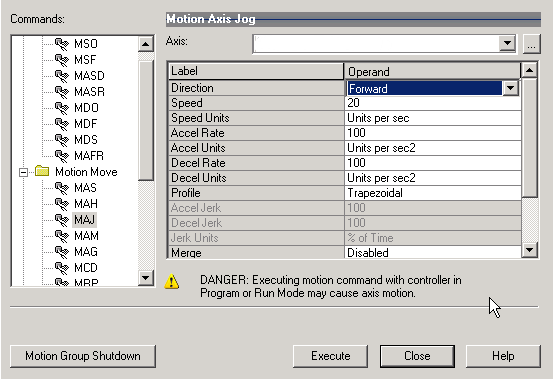
One of the easiest and the fastest means to clear such errors is via the motion as a motion axis direct command if the servo can be controlled or seen so you are aware of the motion commanded by you. You are able to access this by right-clicking on the Axis property and selecting the Motion Axis Direct Commands.
When you do this feature, you need to select the axis that you want to control, make sure you turn on the servo before running or jogging. The system will either do the task commanded or provide an error why it did not work.
Physically Move The Servo
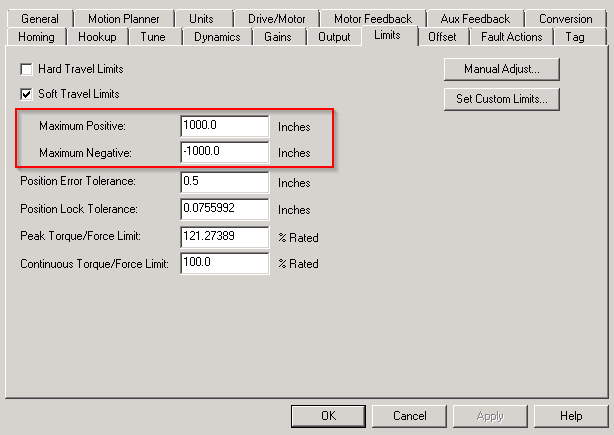
The second option is to physically move the servo back to under that limited position or use the axis property to adjust it back. After moving the servo physically you will then be expected to reset the fault back to the initial position now via motion as a motion axis direct command.
Raise the Servo Soft Limits – Temporary Use Only
If you have ever wanted to stop struggling with servo and learn more about them then try one of my courses below:
Note: the video above is a bit dated so I wanted to give an update, both courses have over 10 hours of content and are very detailed.
Here is the link to better explain that training courses or just look at the header of this site:
Servo Motion Training
or
Advanced Servo Motion Training
Lastly, I would like to thank you for the support and visiting my site for information as this is the reason I started and made the Online PLC Support. It is designed to be one of the go-to sites for information about Rockwell Automation information that is best practices for their software and also acting a second-hand knowledge base which doesn’t cost.
I have over 14 years working with Rockwell Automation software and fully support them as they are the automation leader in the industry, after all, we all need a hand from time to time so why not lend it when you can.
Thanks again for the support and I look forward to making more article s for you as needed. Please reach out to me to let me know if there are topics that you would like to see examples of or need help for.
Shane
RSLogix 5000 Kinetix 6000 Servo Soft Limits
Have you ever had servo physical axis faults that seem to happen and was hard to understand why the programmer put limits or hardware devices to put limits on a servo controller?
I have and this is why I made this article, it will briefly describe soft limits and hard limits of servos controlled by RSLogix 5000 or Studio 5000. Also, highlighting how you can troubleshoot them in the event you have machines that have certain limitations in the application.
Therefore, to understand how this is done, you will first be required to open the axis attributes of the servo, navigate to the limits tab.
Here you will see in the servo attribute tab that there are two limit types:
-Servo Hard Travel Limits
-Servo Soft Travel Limits
Allen Bradley Servo Hard Travel Limits
Allen Bradley Servo Soft Travel limits
This is usually meant for the software part of a device, some systems have this in order to provide support and effort to help prevent the machine from any physical damage.
Here is a video I made to better describe this, this video can also be seen on my YouTube channel.
RSLogix 5000 Kinetix 6000 Servo Limits Breakdown
As you can see from the video, even though it is only a little more than six minutes long, the details of soft limits and overcoming them are well detailed and describe. What I try to do in my videos, is to give a very detailed understanding in a short time frame them cover other elements over an article on my website.
In the next section of this article, I will go over a few more elements on how to recover from a physical fault created by a soft limit.
How to fix a servo physical fault in RSLogix 5000 or Studio 5000
One of the easiest and the fastest means to clear such errors is via the motion as a motion axis direct command if the servo can be controlled or seen so you are aware of the motion commanded by you. You are able to access this by right-clicking on the Axis property and selecting the Motion Axis Direct Commands.
When you do this feature, you need to select the axis that you want to control, make sure you turn on the servo before running or jogging. The system will either do the task commanded or provide an error why it did not work.
Physically Move The Servo
The second option is to physically move the servo back to under that limited position or use the axis property to adjust it back. After moving the servo physically you will then be expected to reset the fault back to the initial position now via motion as a motion axis direct command.
Raise the Servo Soft Limits – Temporary Use Only
If you have ever wanted to stop struggling with servo and learn more about them then try one of my courses below:
Note: the video above is a bit dated so I wanted to give an update, both courses have over 10 hours of content and are very detailed.
Here is the link to better explain that training courses or just look at the header of this site:
Servo Motion Training
or
Advanced Servo Motion Training
Lastly, I would like to thank you for the support and visiting my site for information as this is the reason I started and made the Online PLC Support.
It is designed to be one of the go-to sites for information about Rockwell Automation information that is best practices for their software and also acting a second-hand knowledge base which doesn’t cost.
I have over 14 years working with Rockwell Automation software and fully support them as they are the automation leader in the industry, after all, we all need a hand from time to time so why not lend it when you can.
Thanks again for the support and I look forward to making more article s for you as needed. Please reach out to me to let me know if there are topics that you would like to see examples of or need help for.
Shane